Author: Zen, PANews
The artificial intelligence we encounter today almost all exists within screens. They answer questions, generate images, write code, or are packaged into various agents for business workflows. They have greatly changed the way information is processed, but rarely enter the real world to participate in production, services, and auxiliary labor.
As generative AI has transitioned from being a novelty to a commonplace, the industry has begun to contemplate the next stage: does true artificial intelligence still need the ability to perceive the environment, plan actions, manipulate objects, and learn from real-world feedback?
In the first half of this year, the capital market has begun to provide its own answers. According to TechTimes citing Dealroom data, Physical AI and robotics companies have raised 55.8 billion dollars in funding to date in 2026, nearly double the previous year’s total record.
Additionally, some crypto-native venture capital firms familiar with the cryptocurrency industry have also begun moving into this field. Framework Ventures recently completed a 400 million dollar funding round for its fourth fund, announcing an expansion of its investment focus into AI and robotics.
Currently, almost all capital in the technology sector is directing its imaginations for the next round of technological revolution toward the physical world. The simultaneous shift of capital, industry, and public opinion points to a deeper judgment. That is, Physical AI is not merely another application track for AI, but represents a paradigm shift of artificial intelligence from “information processing systems” to “real-world control systems”.
Physical AI Redefines Intelligence
The rapid development of AI witnessed in the past two years has primarily occurred in the digital information world. Large language models excel in processing text, image models excel in generating visual content, and code models excel in completing programmed tasks within established rules. However, these inputs and outputs still remain in the digital space; even if multimodal models can “speak from images,” their understanding mainly revolves around the correspondences between images, texts, and semantics.
As depicted in early science fiction, the intelligence long envisioned by humanity has never been solely about reasoning, writing, and conversation. For those living in the physical world, intelligence is more closely related to the ability to accomplish tasks: seeing the environment, understanding limitations, planning actions, manipulating objects, and continuously adjusting based on feedback.
What we need is not just a model that can predict “a cup will fall off the table,” but also one that, after assessing the cup's material, weight, and force changes, can ultimately reach out and pick up the cup in a real environment, adjusting force and posture to stabilize the completion of an action that seems simple but involves multiple variables.

This demand and imagination are precisely why Physical AI has garnered attention in the tech community. Today's AI large models already demonstrate strong capabilities in language, images, and code tasks, but once entering the physical world, the issues extend beyond just understanding commands; the more critical question is whether it can link perception, judgment, and action into a stable system. It needs to clearly see the environment, understand the state of objects, plan action paths, and adjust continuously based on feedback during execution.
a16z used the example of folding towels to illustrate this complexity. This daily human action requires machines to systematically understand the deformation of flexible materials, control continuous actions, recognize the contact states between hands and fabric, and readjust when a fold fails. For humans, such actions require almost no thought, but for a robot to perform them, it involves multiple technical challenges, such as flexible material modeling, motion control, tactile feedback, and simulation training.
Nvidia's positioning is also responding to this change. Jensen Huang stated at GTC 2026 that Physical AI has arrived, and every industrial company will become a robotics company. Nvidia's introduction of models and simulation tools such as Cosmos, Isaac, and GR00T is aimed at building an infrastructure from simulated training to real deployment: allowing robots to first learn physical laws and action strategies in virtual settings before moving to real environments such as factories and warehouses to perform tasks.
Physical AI: Transition from “Software Productivity” to “Material Productivity”
Generative AI has already changed the working patterns of urban white-collar workers; it can draft emails, create PPTs, generate copy, and summarize meeting minutes, as well as enhance efficiency in customer service, design, education, and legal assistance. However, these scenarios essentially still fall under information labor, altering the way information is processed.
Physical AI targets a different type of task. It does not deal with documents and code in an office; rather, it engages with components in factories, packages in warehouses, instruments in hospitals, crops in fields, equipment in mines, vehicles on roads, and infrastructure in energy systems. Previous AI primarily improved the efficiency of intellectual labor; Physical AI attempts to enter physical labor and industrial processes.
This is also the reason why capital heavily focuses on this field. Software AI mainly enters corporate software budgets and knowledge workers’ time; once robots can reliably perform real tasks, they touch upon labor costs, capacity bottlenecks, equipment utilization, and supply chain efficiency in manufacturing, logistics, construction, healthcare, agriculture, and defense industries. It competes not for a new SaaS category but for the most core cost factors in the real economy.
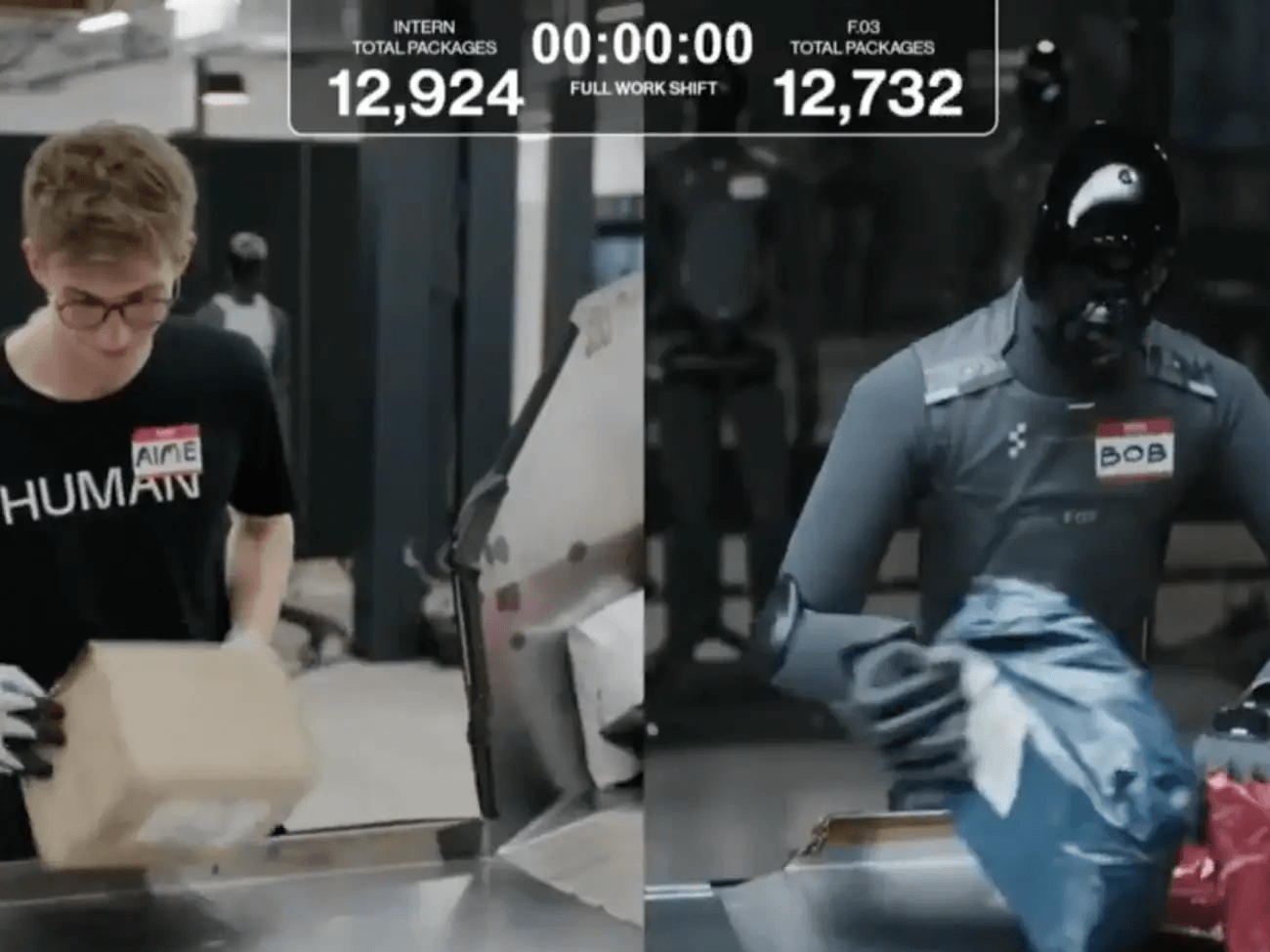
The public competition where Figure AI's humanoid robot competes with humans in sorting express packages provides an intuitive example. This demonstration showcases the possibilities of humanoid robots handling repetitive logistics tasks and the potential pathways for Physical AI to implement: beginning with repetitive, high-frequency, semi-structured, labor-intensive scenarios, and gradually moving into more complex industrial processes.
Compared to household robots, warehouses and factories are easier to deploy since the scenarios are more controllable, the tasks are clearer, and the return on investment is easier to calculate. The Figure 02 robot deployed at BMW’s factory has participated in automotive assembly-related tasks, helping to produce approximately 30,000 vehicles. The latest generation, Figure 03, has entered the assembly and logistics halls of the BMW factory to execute more complex sequencing tasks, including moving heavy trolleys, repositioning itself, and transporting components.
This is also why humanoid robots, despite their high costs and challenges, still attract capital. Traditional industrial automation excels at handling highly standardized tasks, such as welding, handling, and assembly at fixed positions. However, in real factories and warehouses, many jobs lie between standardized and non-standardized — that is, the tasks occur repeatedly, but the sizes, positions, postures, sequences, and environmental states of objects can change continuously.
Packages vary in size, part positions may shift, material trolleys need to be adjusted temporarily, and production lines are rearranged based on orders. Many Physical AI companies currently seeking to enter the market are targeting these semi-structured, high-frequency, commercially valuable, and non-completely standardized scenarios.
From this perspective, Physical AI is, in a sense, introducing AI into the labor market. What it may ultimately change is not a single job position but a kind of labor organization method. In the past, enterprises scheduled human labor through hiring, scheduling, training, and management. In the future, a portion of labor may be scheduled via models, robots, and remote monitoring systems. Aging, labor shortages, manufacturing resettlement, supply chain security, and national industrial capacity are all integrated into this technology narrative.
The Core Competition of Physical AI: “Real World Data”
On the surface, the Physical AI track seems to compete on robotic hardware. The steadier the physical movements, the more dexterous the hands, the longer the battery life, the greater the advantage. But beyond hardware, the more critical competition is shifting toward real-world data.
The previous round of AI competition was built on internet data. Texts, images, videos, codes, and web content have been used on a large scale to train models, supporting the generalization capabilities of large language models in writing, translating, summarizing, and generating tasks. However, Physical AI faces a entirely new data environment; robots need to learn how to move, grasp, carry, and assemble in real spaces and adjust actions based on environmental changes.
The next generation of scarce assets is likely to be action data in the real world. For example, data on how humans perform physical tasks: how hands grasp, how bodies balance, how forces are adjusted, how to correct mistakes after failures, and when to change strategies. This data cannot be directly crawled like web pages. They require real scenarios, robotic hardware, sensors, motion capture, and long-term deployment.
This is also why many robotics companies are building data collection into their core capabilities. Apptronik recently announced the launch of a new robotic training facility, Robot Park, and released the Apollo 2 humanoid robot. This training center collaborates with Google DeepMind, aiming to collect large-scale real-world data to facilitate the scaling of robots from pilot projects to widespread deployment.
The German robotics company NEURA Robotics, which recently received a total of 1.4 billion dollars in investment from Tether, Nvidia, and Amazon, is also directly addressing this issue.
The NEURA Gym launched by NEURA is positioned as a Physical AI training facility, with its core focus on allowing robots to repeatedly practice tasks such as grasping, sorting, and assembling in real or near-real physical environments to generate visual, tactile, force feedback, and spatial awareness data. The accompanying Neuraverse serves as a platform to connect robots, developers, digital twins, and training data, enabling capabilities trained in one scenario to be reused across more robots and applications. NEURA and the Technical University of Munich have also announced the construction of TUM RoboGym at Munich Airport, touted as Europe’s largest research and training center for Physical AI.

Based on this trend, entrepreneurial directions around robotic data have also begun to emerge. For instance, Roborecs positions itself as “the data facility behind Physical AI,” recruiting and training operators to remotely control robots in performing intensely contact-centric tasks like two-handed assembly, while collecting visual, force, and tactile data to be licensed for use by robot manufacturers.
Evidently, the Physical AI ecosystem is becoming specialized, with some companies building robotic bodies, some developing robot “brains,” some creating simulation platforms, and others focused on collecting data necessary for training robots.
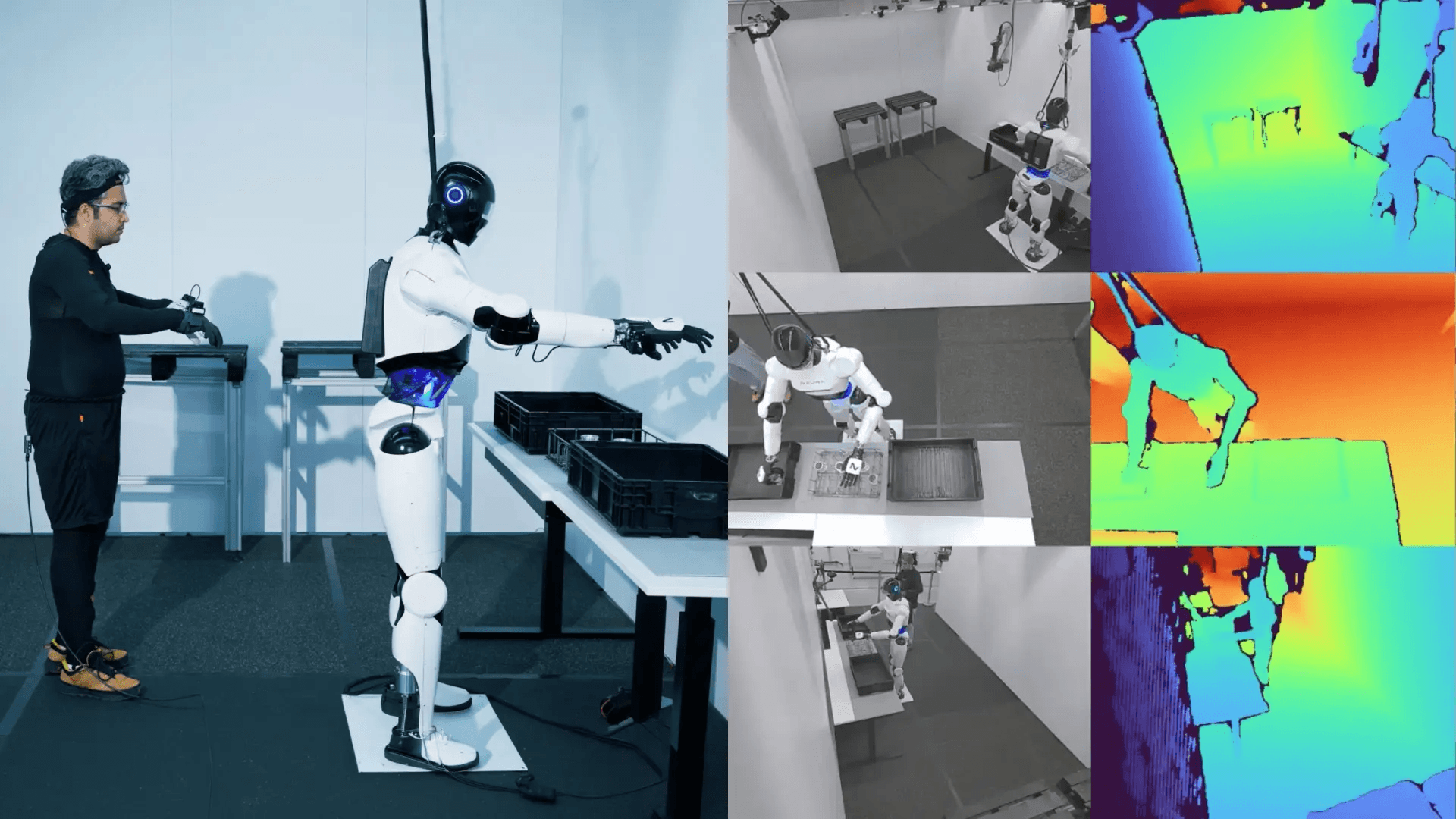
The academic community is also rapidly advancing around this issue. Recent research papers on humanoid robot remote operation and action transfer have emerged in abundance, such as real-time mapping of human actions onto the Unitree G1 robot using IMU motion capture suits or constructing portable humanoid robot data collection systems via VR devices. These studies collectively point toward the question of how to convert human bodily experience into data that robots can learn from and reuse.
However, although capital and imagination are plentiful, for the still nascent Physical AI, today’s humanoid robots are far from universally deployable, and many demonstrations still rely on controlled environments, remote operations, and meticulously designed tasks.
But it at least indicates that the development of artificial intelligence is entering a new stage. This process will not be immediate, nor will it necessarily conclude with today’s most popular humanoid robot forms, but the transition of AI from screens to the real world has already become an increasingly clear direction in the next round of technological competition.
免责声明:本文章仅代表作者个人观点,不代表本平台的立场和观点。本文章仅供信息分享,不构成对任何人的任何投资建议。用户与作者之间的任何争议,与本平台无关。如网页中刊载的文章或图片涉及侵权,请提供相关的权利证明和身份证明发送邮件到support@aicoin.com,本平台相关工作人员将会进行核查。







