除了 AI Agent 以外,具身机器人是另一大 AI 时代的垂直落地场景。Morgan Stanley 曾在一份报告中预测,2050 年全球人形机器人整体市场规模有望突破 5 万亿美元。
伴随着 AI 的发展,机器人将逐渐从工厂里的机械臂逐步进化为我们日常生活中的同伴,依靠 AI 而获得感知和理解力,以至于获得独立决策的能力。问题是,今天的机器人更像是一群不会互相说话的「哑巴」:每家厂商用自己的语言、自己的逻辑,软件互不兼容,智能彼此无法共享。这就像你买了一辆小米、一辆特斯拉,但它们连路况都无法一起判断,更别提协同完成任务了。
OpenMind 想要改变的,正是这个「各自为战」的局面。他们不造机器人,而是要搭建一个「让机器人说同一种语言、遵守同一套规则、一起完成事情」的协作系统。打个比方,iOS 和安卓让手机智能应用爆发,以太坊让加密世界有了共同底座,而 OpenMind 想做的,是为全球机器人打造一个统一的「操作系统」和「协作网络」。
一句话,OpenMind 正在构建机器人的通用操作系统,让机器人不仅可以感知和行动,还可以通过去中心化协同,在任意环境下安全且规模化的合作。
谁在托举这套开放底座
OpenMind 已完成 2000 万美元的种子轮与 A 轮,由 Pantera Capital 领投。更重要的是,资本的「广度与互补」几乎把这条赛道的关键拼图都带齐了:一端是来自西方科技与金融生态的长期力量——Ribbit、Coinbase Ventures、DCG、Lightspeed Faction、Anagram、Pi Network Ventures、Topology、Primitive Ventures——他们熟悉加密与 AI 基础设施的范式迁移,能够为「智能体经济 + 机器互联网」提供模型、网络与合规的经验;另一端是东方的产业动能——以红杉中国为代表的供应链与制造体系——深知「把一台样机做成可规模交付的产品」意味着哪些工艺与成本门槛。两股力量的叠加,让 OpenMind 不只拿到钱,更拿到「从实验室到产线、从软件到底层制造」的路径与资源。

这条路径也正在和传统资本市场接轨。2025 年 6 月,KraneShares 推出全球人形与具身智能指数 ETF(KOID)时,选用了由 OpenMind 与 RoboStore 联合定制的人形机器人 Iris 在纳斯达克敲响开市钟,成为交易所历史上首位完成这一仪式的「机器人来宾」。这既是一次技术与金融叙事的同频,也是一种关于「机器资产如何被定价与结算」的公开信号。
正如 Pantera Capital 合伙人 Nihal Maunder 所说:
「如果我们希望智能机器在开放环境中运行,就需要一个开放的智能网络。OpenMind 正在为机器人做的事,就像 Linux 之于软件、以太坊之于区块链。」
从实验室到产线的团队
OpenMind 的创始人 Jan Liphardt 为斯坦福大学副教授、前伯克利教授,长期研究数据与分布式系统,在学界与工程侧均有深耕。他主张推进开源复用、以可审计、可追溯的机制替代黑箱、用跨学科方法整合 AI、机器人和密码学。
OpenMind 的核心团队来自 OKX Ventures、Oxford Robotics Institute、Palantir、Databricks、Perplexity 等机构,覆盖机器人控制、感知与导航、多模态与 LLM 调度、分布式系统与链上协议等关键环节。同时,一支由学术界与产业界专家组成的顾问团队(如 Stanford 机器人负责人 Steve Cousins、牛津区块链中心 Bill Roscoe、Imperial College 安全 AI 教授 Alessio Lomuscio)也为机器人的「安全、合规、可靠」提供保障。
OpenMind 的解法:两层架构,一套秩序
OpenMind 构建了一套可复用的基础设施,让机器人能跨设备、跨厂商、甚至跨国界协作与信息互通:
设备侧:提供面向实体机器人的 AI 原生操作系统 OM1,把从感知到执行的全链路连成闭环,让不同形态的机器都能理解环境并完成任务;
网络侧:构建去中心化协作网络 FABRIC,提供身份、任务分配与通信机制,确保机器人在协作时能识别彼此、分配任务、共享状态。
这一套「操作系统+网络层」的组合,让机器人们不仅能各自行动,更能在一个统一的协作网络中互相配合、对齐流程、一起完成某个复杂任务。
OM1:面向实体世界的 AI 原生操作系统
就像手机需要 iOS 或 Android 来运行应用,机器人同样需要一个操作系统来运行 AI 模型、处理传感器数据、做出推理决策并执行动作。
OM1 便为此而生,它是一个面向现实世界机器人的 AI 原生操作系统,让它们能够感知、理解、规划并在各种环境中完成任务。与传统、封闭的机器人控制系统不同,OM1 是开源、模块化、硬件无关(hardware-agnostic)的,它可以运行人形、四足、轮式、机械臂等多种形态上。
四个核心环节:从感知到执行
OM1 把机器人智能拆解为四个通用步骤:Perception(感知)→ Memory(记忆)→ Planning(规划)→ Action(执行)。这套流程被 OM1 完整模块化,并通过统一的数据语言打通,实现可组合、可替换、可验证的智能能力构建。
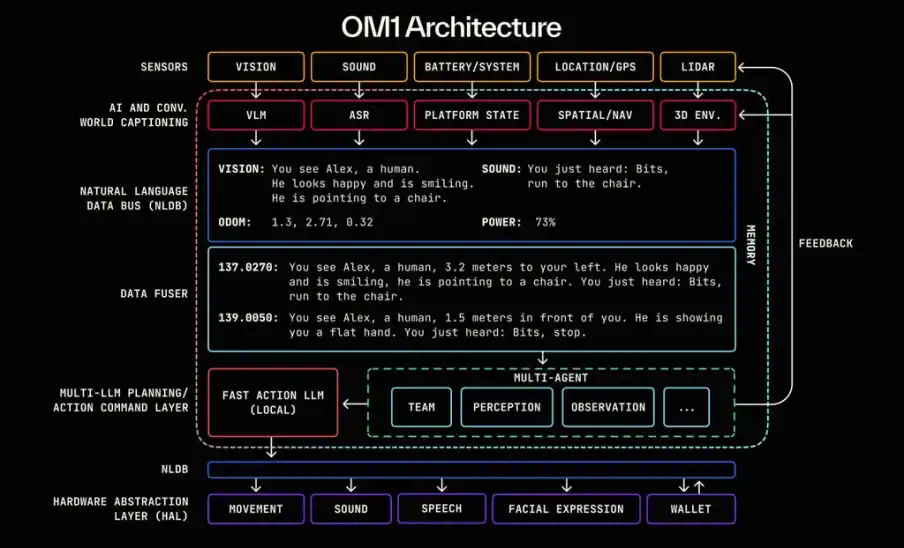
OM1 的架构
具体到架构,OM1 的七层链路如下:
Sensor Layer(传感器层)收集信息:摄像头、LIDAR、麦克风、电池状态、GPS 等多模态进行感知输入。
AI + World Captioning Layer(世界理解层)翻译信息:多模态模型将视觉、语音、状态转为自然语言描述(如「你看到一个人在挥手」)。
Natural Language Data Bus(自然语言总线)传递信息:所有感知被转成带时间戳的语言片段,在不同模块间传递。
Data Fuser(情境融合层)组合信息:整合多源输入,生成用于决策的完整语境(prompt)。
Multi-AI Planning/Decision Layer(多智能体规划层)生成决策:多个 LLM 读取语境,结合链上规则生成行动计划。
NLDB 下行通道:将决策结果通过语言中间层传递给硬件执行系统。
Hardware Abstraction Layer(硬件抽象层)做出行动:将语言指令转为底层控制命令,驱动硬件执行(移动、语音播报、交易等)。
快速上手,广泛落地
为把「一个想法」尽快变成「机器人可执行的任务」,OM1 把开发路径做成了开箱即用的一条龙:开发者用自然语言结合大模型定义目标与约束,数小时内即可生成可复用的技能包,而不必经历数月的硬编码;多模态管线原生打通 LiDAR、视觉与音频,省去手写复杂的传感器融合;模型侧预接好 GPT-4o、DeepSeek 与主流 VLM,语音输入输出直接可用;系统层全面兼容 ROS2 与 Cyclone DDS,并通过 HAL 适配层无缝接入 Unitree G1、Go2、Turtlebot 与各类机械臂;同时与 FABRIC 的身份、任务编排与链上结算接口原生联动,使机器人既能单机执行,也能加入全球协作网络、按量计费与审计。
在真实世界里,OM1 已经完成多场景验证:四足平台 Frenchie(Unitree Go2)在 2024 年 USS Hornet 国防技术展示中跑通复杂场地任务,人形平台 Iris(Unitree G1)在 2025 年 EthDenver 的 Coinbase 展台完成现场人机交互,并通过 RoboStore 的教育项目走入全美高校课程,把同一套开发范式扩展到教学与科研的一线。
FABRIC:去中心化的人机协作网络
即便单机智能足够强,如果彼此无法在可信前提下协同,机器人仍旧只能各自为战。现实里的割裂来自三个根本问题:身份与位置无法被标准化证明,导致「我是谁、我在哪、我正在做什么」难以被外部信任;技能与数据缺少可控的授权路径,无法在多主体之间安全共享与调用;控制权与责任边界不清,频率、范围和回传条件难以被事先约定、事后追溯。FABRIC 针对这些痛点给出系统级解法:用去中心化协议为机器人与操作员建立可验证的链上身份,围绕该身份提供任务发布与匹配、端到端加密通信、执行记录与自动结算的一体化基础设施,让协作从「临时对接」变成「有凭有据的制度」。
在运行形态上,可以把 FABRIC 理解为把「定位、连接、调度」合在一起的网络平面:身份与位置被持续签名与校验,使节点天然拥有「彼此可见且可信」的邻近关系;点到点通道像一条按需建立的加密隧道,无需公网 IP 和复杂网络设置就能远程操控与监控;任务从发布到接单、执行到验收的全过程被标准化记录,既能在清算时自动分润与退押,也能在合规或保险场景下复核「谁在何时何地完成了什么」。在此之上,典型应用自然生长出来:企业可以跨地域远程运维设备,城市可以把清洁、巡检、配送做成可按量调用的 Robot-as-a-Service,车队可以实时汇报路况与障碍生成共享地图,需要时还可就近调度机器人完成 3D 扫描、建筑测绘或保险取证。
随着身份、任务与结算三件事被同一网络托管,协作的边界被事先写清,执行的事实被事后验证,技能的调用有了可度量的成本与收益。长期看,FABRIC 将演进为机器智能的「应用分发层」:技能以可编程的授权条款在全球范围内流通,调用产生的数据又反哺模型与策略,使整张协作网络在可信约束下持续自我升级。
Web3 正在把「开放」写进机器社会
机器人行业正快速集中于少数平台,硬件、算法与网络被封闭栈锁住。去中心化的价值,在于让任何品牌、任意地域的机器人在同一开放网络中协作、交换技能并完成结算,而不必依附单一平台。OpenMind 用链上基础设施把这一秩序编码化:每台机器人与操作员拥有唯一链上身份(ERC-7777),硬件指纹与权限可查;任务在公共规则下发布、竞价与匹配,执行过程生成带时间与位置的加密证明上链存证;任务完成后合约自动结算分润、保险与押金,结果可实时核验;新技能通过合约设定调用次数与适配设备,在保护知识产权的同时实现全球流通。由此,机器人经济自诞生起就具备抗垄断、可组合、可审计的基因,「开放」被写进机器社会的底层协议。
让具身智能走出孤岛
机器人正从展台走向日常:医院里巡视病房,校园里学习新技能,城市里完成巡检与建模。真正的难点不在更强的马达,而在让不同来源的机器彼此可信、信息互通、协同办事;要规模化,技术之外更关键的是分发与供给。
OpenMind 的落地路径因此从渠道入手而不是堆叠参数。与 RoboStore(宇树在美国最大的经销商之一)联手,把 OM1 做成标准化教材与实验套件,在全美几千所高校同步推进软硬件的一体化供给。教育体系算得上是最稳的需求侧,这条链路直接把 OM1 植入未来几年的开发者与应用增量。
面向更广的社会分发,OpenMind 依托投资人生态把「软件的出海口」做成平台化。Pi 等体量庞大的加密生态也为这一模式增添了想象力,逐步形成「有人写、有人用、有人付费」的正向飞轮。由教育渠道提供稳定的供给,由平台分发带来规模的需求,OM1 与上层应用由此具备可复制的扩张轨迹。
在 Web2 时代,机器人多被锁在单一厂商的封闭栈里,功能与数据难以跨平台流动;当教材标准与分发平台接上之后,OpenMind 把开放变成默认设置:同一套系统进入校园、走向产业,再通过平台网络持续扩散,让开放成为规模化落地的默认起点。
免责声明:本文章仅代表作者个人观点,不代表本平台的立场和观点。本文章仅供信息分享,不构成对任何人的任何投资建议。用户与作者之间的任何争议,与本平台无关。如网页中刊载的文章或图片涉及侵权,请提供相关的权利证明和身份证明发送邮件到support@aicoin.com,本平台相关工作人员将会进行核查。







